具身机器人(以人形机器人为代表)
侧重“高灵活性、低重量、动态响应快”
具身机器人需模仿人类运动(步行、抓取、转身等),关节数量多(20-30个自由度),且需在动态场景中快速调整姿态(如避免摔倒)。因此,其减速机的核心需求是极致轻量化、高动态响应(毫秒级扭矩调整)、低噪音,同时需兼顾一定负载能力(单臂负载5-10公斤)。

☆ 中空杯谐波减速机:
人形机器人手指、手腕等精细关节的首选。
特点:采用中空结构(方便布线和传感器集成),重量仅50-200克(比工业谐波减速机轻60%);动态响应速度提升至工业型号的2-3倍(扭矩调整延迟<10毫秒);通过磁粉制动技术优化阻尼控制,适合精细操作(如抓取鸡蛋、拧瓶盖)。
☆ 无框式行星减速机:
用于腿部、腰部等中等负载关节。
特点:取消外壳,直接与电机转子集成,重量减少30%;齿轮采用斜齿设计,传动效率提升至95%以上(减少能耗);支持大角度摆动(±120°),适配人类关节的运动范围。
☆ 新型柔性减速机:
部分厂商自研,融合谐波与行星结构的优势。
特点:采用弹性齿轮+磁耦合设计,无物理接触磨损,寿命提升至1万小时以上;兼具高刚性(接近RV减速机)和低重量(接近谐波减速机),适合髋关节、肩关节等核心承重关节。
UKS在对国际一线品牌的各类油封结构进行系统性研究的基础上,结合UKS二十年的技术积累,不断优化迭代设计,推出了UKS机器人专用油封,该油封专门为机器人中常见工况设计,解决了普通骨架油封难以在窄断面条件下长期保持稳定密封的问题。
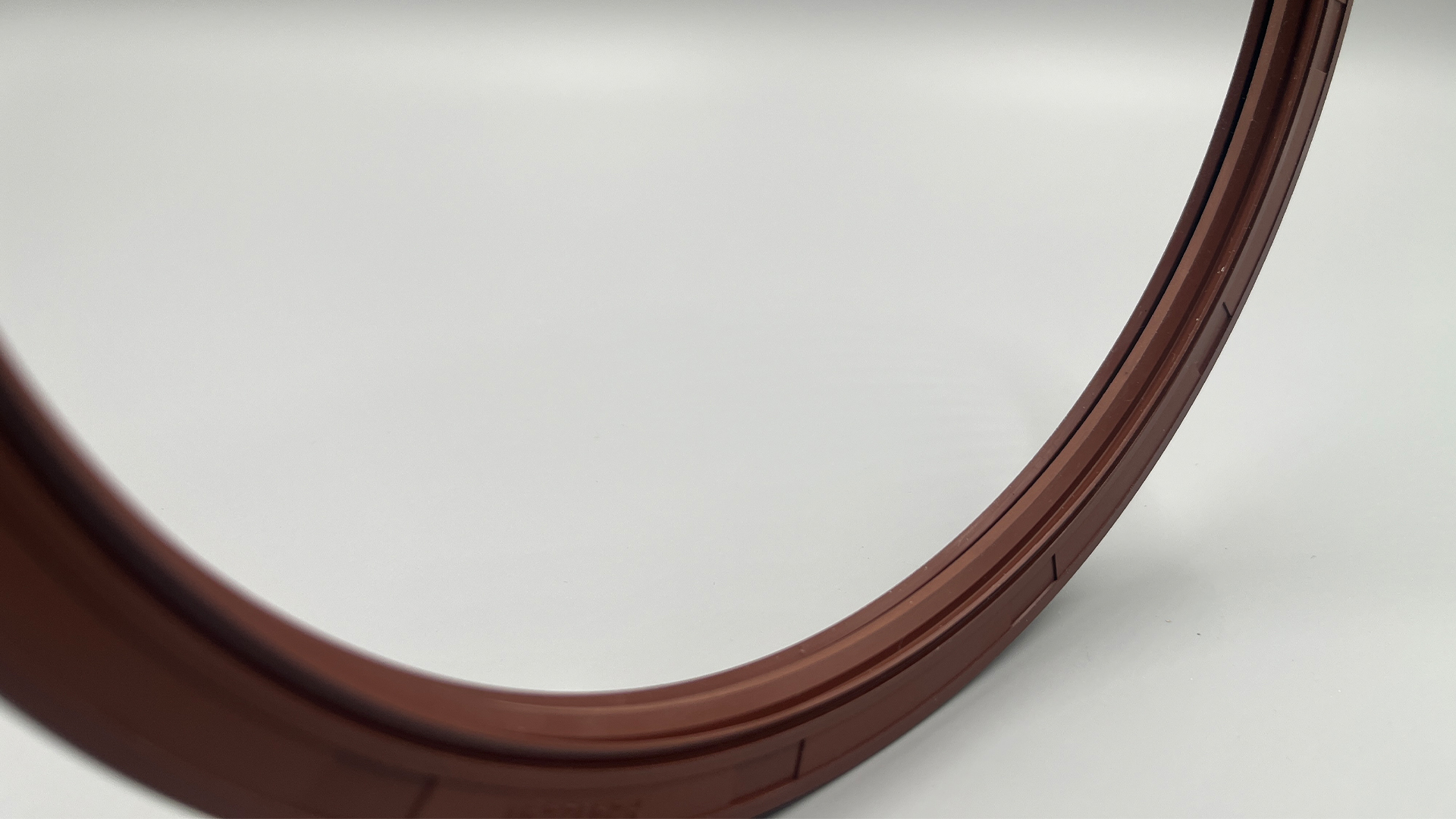
毫米级空间征服者
▸窄断面拓扑优化设计,突破传统油封的安装空间限制
▸自适应薄壁结构兼容精密关节的微形变
双重防尘堡垒
▸外层防尘唇:充分阻挡外部粉尘颗粒
▸内层柔性补偿层:动态填补微观磨损间隙
▸基于双重径向力测试理论,实现动静密封状态的无缝切换
磨耗系数理论实践范本
▸通过材料配比优化将磨损系数降低至理论极值
▸三重复合结构设计:
- 低摩擦表面层(减少温升)
- 高弹性中间层(补偿形变)
- 抗蠕变基底层(保持径向力稳定)
机器人油封橡胶材料多以氟橡胶(FKM)为主
▸耐高温性能卓越
长期使用温度可达200℃,全氟醚橡胶(FFKM)等特种型号甚至能在300℃下保持弹性。
▸抗化学腐蚀性极强
对强酸(如发烟硝酸、浓硫酸)、强碱、有机溶剂(如氯代烃、高芳烃汽油)及油类具有高度耐受性,几乎不溶胀或降解。
▸优异的耐老化与真空性能
耐臭氧、紫外线及大气老化,自然存放十年后性能仍稳定。
▸机械性能与电绝缘性平衡
抗撕裂强度达3~7 MPa,伸长率可超过600%,同时具备低频电绝缘能力。
UKS生产系统的技术人员通过二十年的探索,另辟蹊径找到了解决弹性体油封尺寸和结构的科学性问题。从而解决了橡胶弹性体制品生产企业对产品尺寸控制的困扰。橡胶产品尺寸一致性问题的解决,使得UKS油封产品尺寸和结构科学性控制进入了发展的快车道。
产品一致性工艺的本质是通过“设计标准化-过程数字化-控制智能化”的三层体系,将人、机、料、法、环(4M1E)的变异控制在可接受范围内。其实施关键点包括:
1.建立量化的工艺标准与可追溯的参数记录;
2.运用细致的数据积累随时调节和识别不同条件下的油封表现;
3.借助IoT、AI等技术实现全生产流程实时监控与预测性调整;
4.通过二次元影像学分析设备全方位控制瑕疵品,实现“零缺陷”生产目标。

☆ UKS持有70余项核心技术专利;
☆ 年利润额的30%用于技术研发,不断深耕密封件设计和制造技术;
☆ 研、产、销一体化,在不断发展过程中积累了丰富的产品设计和研发经验。